Syllabus of Introduction to Radar

Background
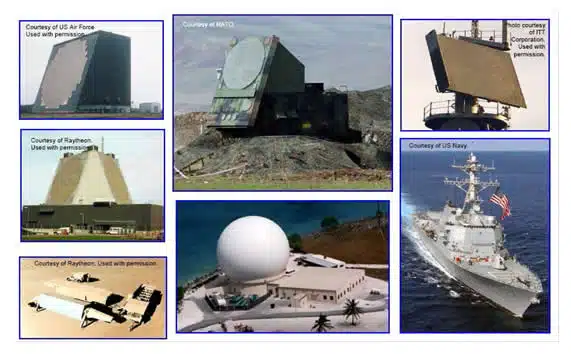
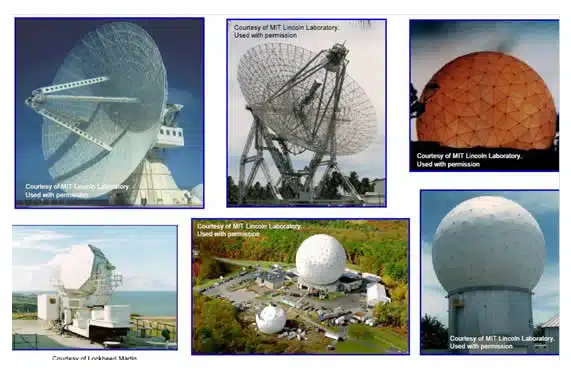
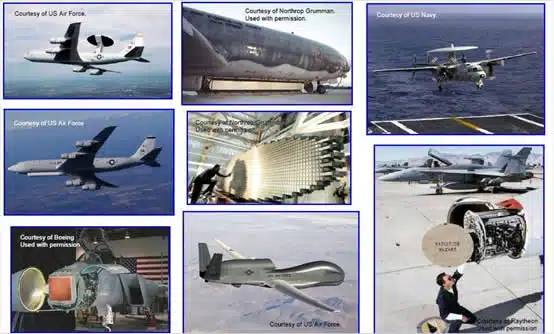
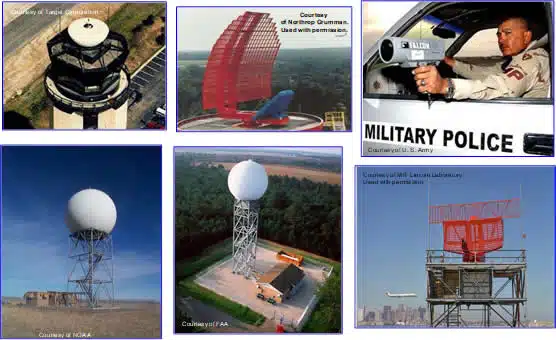
- What is a radar?
- Radar types
- Phased arrays
- The electromagnetic waves
- Frequency and wavelength
- Power and dB
- Diffraction and polarization
- Radar observables
- Block diagram

Radar Equation
- Transmit and receive signals
- Range and time
- PRI, PRF, bandwidth, Doppler
- The radar range equation
- Signal to noise
- Examples

Propagation
- Atmosphere
- Earth curvature
- Multi path
- Refraction

Radar cross section
- Definitions
- Parameters and values
- Canonical shapes
- Fluctuations
- Swerling models
- Examples
- Calibrated targets, corner reflectors

Detection of signals
- Noise and probabilities
- Pulse integration
- Target fluctuations
- CFAR
- Pulse compression

Clutter rejection and Doppler processing
- Ground clutter
- Other types of clutter
- Doppler filtering
- Moving target indicator
- Pulse Doppler processing
- Range and speed ambiguities
Resolution, accuracy and tracking
- Radar measurements and estimates
- Resolution and accuracy
- Range
- Angle
- Doppler
- Tracking
- Monopulse
- Ambiguity functions
Beamforming and scanning
- The coverage problem
- Phased arrays
- Multi-beam arrays
- MIMO